- Home
- Documentation
- Community
- Projects
- Boards
- Agilex 5 SoC
- Agilex 7 SoC
- Arria 10 SoC
- Nallatech 385A - Arria 10 FPGA Network Accelerator Card
- Nallatech 385A-SoC Accelerator Card with Arria 10 FPGA
- ALARIC Instant DevKit ARRIA 10 SoC FMC IDK by REFLEX CES
- Altera Arria 10 SoC Virtual Platform
- Altera Arria 10 SoC Board
- Nallatech 510T compute acceleration card with Intel Arria 10 FPGA
- REFLEX CES Achilles Arria 10 SoC SOM
- Terasic Arria10 SoC Board : HAN Pilot Platform
- Arria V SoC
- Cyclone V SoC
- Altera Cyclone V SoC Board
- Arrow SoCKit User Manual - July 2017 Edition
- Arrow SoCKit User Manual - November 2019 Edition
- Arrow SoCKit Evaluation Board
- Atlas-SoC Development Platform
- Critical Link MitySOM-5CSx Development Kit
- Cyclone V Ethernet driver problems
- DE10-Nano Development Board
- Terasic DE10-Standard Development Kit
- Devboards DBM-SoC1 module
- Devboards DBM-SoC2 module
- EBV SoCrates Evaluation Board
- Enclustra Mercury SA1 SoC Module
- Enterpoint Drigmorn 5
- Enterpoint Larg 2
- Altera Cyclone V SoC Development Platform
- Mpression Helio SoC Evaluation Kit by Macnica
- Mpression Sodia Evaluation Board by Macnica
- ARIES Embedded - MCV System on Module
- Mpression Borax SOM Module and Development Kit by Macnica
- Enterpoint Mulldonoch 3
- Networked Pro-Audio FPGA SoC Development Kit by Coveloz
- NOVPEK™CVLite
- NOVSOM®CV
- NOVSOM®CVLite
- NovTech IoT Octopus™
- NovTech NetLeap™
- Enterpoint Raggedstone 4
- Solectrix SMARC compliant System-on-Module
- Terasic DE1-SoC Development and Education Board
- Stratix 10 SoC
- Find a Board
- News
Projects
Similar topics
-
CycloneV HPS FIFO
Example using FIFOs to communicate HPS to FPGA on DE1 board Cyclone V
-
Mapping HPS Peripherals over the FPGA fabric to FPGA I/O and using Python to control them
Step by step instructions that show how the FPGA configuration, all bootloaders and a Linux system with the Yocto Project are developed in order to access these components with embedded Linux.
-
Agilex 7 SoC E-Tile Design Example With IEEE1588 PTP (10GE/25GE/Dynamic Reconfiguration) - Sustaining
This page demonstrates the architecture, functionality and build flow for 10GE Fixed Link 25GE Fixed Link Dynamic Reconfiguration design
-
Datamover Design Example
Datamover example design sets to demonstrate design practices and software solutions to achieve high performance real time application with HPS ARM processor.
-
Using CMSIS with Custom FPGA Logic
Describe format of CMSIS SVD file, integrate the SVD file into the system, and expose the register of custom logic in the register view of DS 5.
Recent Changes
-
 Intel® Agilex® 7 I-Series Transceiver-SoC Development Kit (4x F-Tile) System Example Design With IEEE1588 PTP (25GE/10GE 2-Port)
Intel® Agilex® 7 I-Series Transceiver-SoC Development Kit (4x F-Tile) System Example Design With IEEE1588 PTP (25GE/10GE 2-Port)
-
 Multiprocessor Nios V/m system: creating your first GeMRTOS application
Quick Start Guide on how to create a multiprocessor system with Nios V processor and GeMRTOS support
Multiprocessor Nios V/m system: creating your first GeMRTOS application
Quick Start Guide on how to create a multiprocessor system with Nios V processor and GeMRTOS support -
 Setting up and Using Bridges on Agilex 7 SoC
Setting up and Using Bridges on Agilex 7 SoC
-
 Agilex 7 SoC With eMMC Storage On HPS
Agilex 7 SoC With eMMC Storage On HPS
-
 Stratix 10 SoC with eMMC Storage on HPS
Stratix 10 SoC with eMMC Storage on HPS
Data exchange between HPS & FPGA to send commands from HPS to FPGA
| Board: | Arria10SoCDevelopmentKit |
|---|---|
| State: | running |
| Members: | JohnBurleson |
| Homepage: | https://github.com/Jambie82/HPS_2_FPGA/blob/master/README.md |
| Git: | https://github.com/Jambie82/HPS_2_FPGA |
The state machine to send data from FPGA to HPS has three states (0 → 4 → 8 → then back to zero) And there is a separate state machine to process the commands to do useful work, and it has four states (0 → 5 → 6 → then back and forth with state 7 → then back to zero). State 6 is where the useful work is done (for this example the LEDs on/off), all the rest just check FIFO status and move data. (See the state transition diagram 'state.jpg' for a graphical view of the sequence.) To Run the Demo;
-
Start your A10 SoC Devkit board and boot up Linux in your terminal window.
-
Copy the three executeable files from the 'HPSTest\LinuxExecuteables' folder over to your current Linux directory on your Devkit board.
-
Start Quartus on your PC and start the project in the 'HPSTest\QuartusProject\a10_devkit_test' folder.
-
Using the 'Programmer' item on the 'Tools' menu in Quartus download the 'ghrd_10as066n2.sof' file found in the project's 'output_files' folder into the FPGA.
-
Before executing the programs (commandOne, commandTwo, and comandThree) in yout Linux window be sure you make them executeable as shown below;
chmod 777 commandOne chmod 777 commandTwo chmod 777 commandThree
- You can get help on any of the commnandXXX files by running them with the -h switch;
./commandOne -h commandOne - this turns a single LED On or Off depending on arguments passed in on the command line. This has two input parameters which must be entered in this order. #1 → LED number to be modified (0 to 3) #2 → condition value ( 0 or 1 , for OFF and ON Option -v prints verbose status output (also sets -t option). Option -t outputs as a command line terminal, otherwise output is as though the return strings are being passed over a serial interface first line - status, second thru fourth line are returned data - (which is meaningless in this case). Options -? or -h print this help text and does not execute the command. Errors are always written to screen.Example;
commandOne 3 0 -t Ok This runs the command in terminal mode (interactive use) and turns the #3 LED off. The returned status here shows that the command executed correctly. commandOne 2 1 1 0 0 0 This runs the command in serial mode (RS232 user, so the return values are sent as four numeric strings). The command sets the condition of LED #2 to ON. The returned data shows that the command executed correctly. The three remaining zeros do not represent anything, just empty arguments.
-
commandOne passes command line args to turn lights on/off.
-
commandTwo has no arguments and just toggles the lights.
-
commandThree turns and auto-sequencer on and off so the FPGA runs the lights on its own. (If the FPGA leaves lights on when it is turned off you can get it to turn them off by starting it again (using commandThree) and waiting until it has the lights all off, then run commandThree again to turn it off (but be quick because you only have about a second).
-
I built the FPGA project using Quartus v17.0.2. You can run the QSYS tool to see the setup of the two FIFOs.
-
I compiled the Linux programs on my PC using Eclipse for DS-5 v5.26.0, though I have done the same using v5.23.0 in the past.
-
There are lots more details on exactly where the FIFO documentation is located and where the address connections are defined but this is all I have time for today.
The Linux code and other files can be found at my github here >> https://github.com/Jambie82/HPS_2_FPGA Yes, there are always more details. We need the address references to the hardware elements used by the HPS to write Linux programs (in C) to interface the HPS to the hardware.
These addresses come from a header file (in our case here it is arria10_hps_0_arm_9_0.h, but there are others). This header file is generated by a Quartus (Linux) command line tool called ‘sopc-create-header-files’, which is in the Windows directory for Quartus (on my machine it is C:\intelFPGA_pro\17.0\Quartus\sopc_builder, but this is installation dependent). You should put this folder in your path so you dont need to navigate to it when you want to use this.
This tool uses a file created by Quartus when the FPGA build was completed as its input, and its output is one or more ‘C’ header files. The input file has a suffix that ends in ‘.sopcinfo’ and has a prefix that matches your project name. During compilation Quartus creates severel versions of this file at different stages of the compile so if you go exploring you will find them in subdirectories labeled ‘synthesized’, ‘planned’, ‘placed’, ‘routed’, and ‘final’. The one you want is in the ‘final’ directory which is (on my computer) C:\HPStest\a10_devkit_test\qdb_compiler\ghrd_10as066n2\root_partition\17.0.2\final\1\sld_syconfiles
You won't be working in that directory since it can be overwritten on each compile so you should copy the a10_devkit_flat.sopcinfo file into a working directory you make for your Linux C work.
Since the sopc-create-header-files program is a Linux program you need to start a Linux command line shell. Quartus provides one for Windows and it is started by running the Embedded_Command_Line.bat batch file in the (on my installation) C:\intelFPGA_pro\17.0\embedded directory.
One your Linux command shell is started you shoud navigate to your working directory, copy your .sopcinfo file into that directory then run the sopc-create-header-files program and create the C header files.
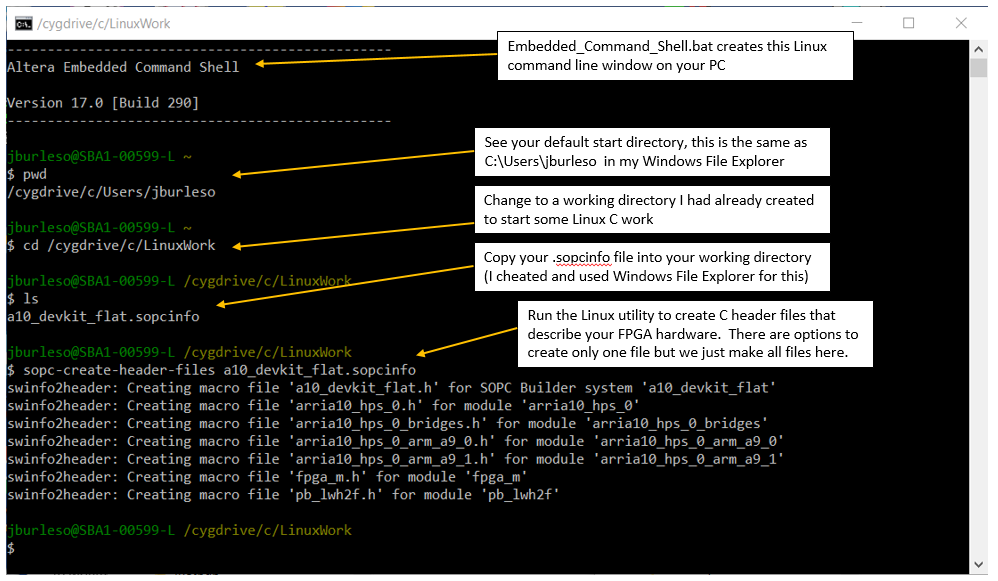 image.png998x581 148 KB
The header file we want for this program is arria10_hps_0_arm_9_0.h. This contains a lot of info but we only need a few references to addresses inthe FPGA hrdware from this file. Look for the line
image.png998x581 148 KB
The header file we want for this program is arria10_hps_0_arm_9_0.h. This contains a lot of info but we only need a few references to addresses inthe FPGA hrdware from this file. Look for the line#define ONCHIP_MEMORY2_0_BASE 0xc0000000
This has the bas address of the on chip memory on the FPGA. The FIFO memory comes from this memory pool so we need to know where the memory locations are to read and write to them.
We also need the =references
#define FIFO_HPS_TO_FPGA_IN_BASE 0xc0040000
#define FIFO_HPS_TO_FPGA_IN_SPAN 4
so we know where to find the FIFO controls and the length of the FIFO (this was defined earlier in QSYS)
I would just copy the parts that are needed for my C program to make for clearer reading. Once you memory map to these addresses (or offsets from them) your C can read and write to locations that the FPGA will also recognize and you can control the hardware or share control with the FPGA.